199001026 - INTRODUCTION - ELECTRICALLY CONTROLLED STEERING SYSTEM
SPECIFICATIONS
The EPS (Electrical Power Steering) produced by DELPHI has a power assisted steering device which is designed to lighten the effort required from the driver on the steering wheel especially during steering manoeuvres at low speed without however making it too light in normal driving conditions.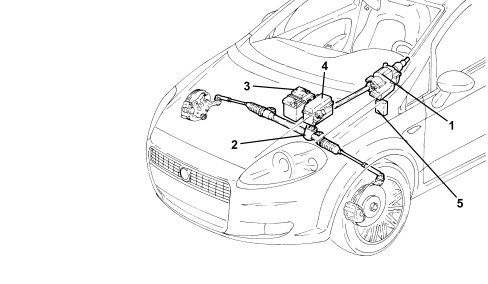
ACTIVATION STRATEGIES
The system operating strategy is illustrated in the diagram below.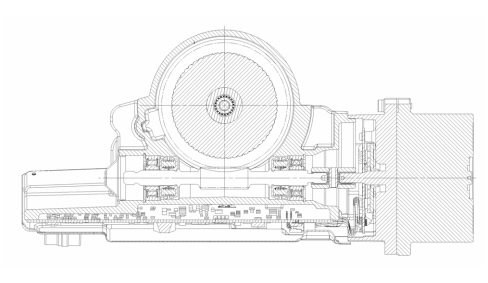
BASIC OPERATION
Depending on the driver''s requirements (torque at the steering wheel) and the speed of the vehicle, the electric steering node management control unit (NGE) controls the electric servo motor that assists the steering column to rotate.The motor applies a torque to the actual steering column by means of a worm screw mechanism, thereby saving the driver the effort of steering.Variable servo assistance depending on the speed of the vehicle
As the speed of the vehicle increases the user proportionally increases the effort applied to the steering wheel because the resistant force at the wheels decreases as the vehicle speed increases.As a result, making use of the vehicle speed signal, the NGE implements a lesser degree of steering assistance.Active return
The return stage refers to the realignment function normally produced by the geometry of the vehicle''s front section when the steering is released after steering.This function is designed to make the realignment quicker causing the servo motor to intervene to help the normal geometric effect.The active return correction varies depending on the speed of the vehicle:- It is greatest at low speeds- It is lowest at high speeds.The servo motor carries out the active return of the steering wheel depending on the steering angle in relation to the centre. The greater the steering angle, the greater the effort of the motor to realign the wheels.Steering return oscillation damping
After the steering wheel is released, following steering, the vehicle chassis produces oscillations (A) which, if they persist for a while, can become tiresome.The servo motor reduces the extent of the oscillations (B) during the return to the straight line driving route and intervenes more at high speeds.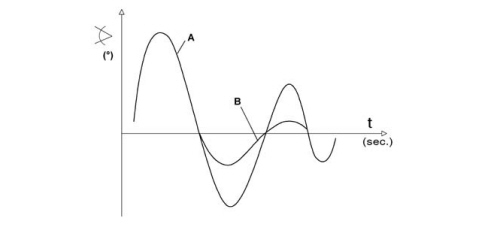
Power assistance that can be selected
The user can choose between two driving modes using the button in the control panel:- Normal for normal power assistance at medium and high speeds,- City for easier driving whilst parking and at low speeds thanks to greater assistance.Nge calibrations
The system manages 5 different driving calibrations. The NGE receives vehicle information (engine type and steering box type) from the Body Computer via the CAN and selects the correct calibrations from inside its memory.The two NGE configurations are illustrated in the diagram below:Axially and lengthwise adjustable column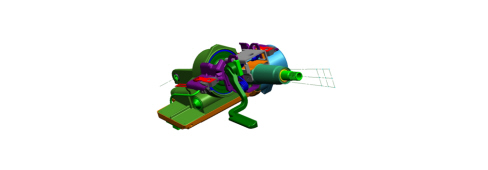
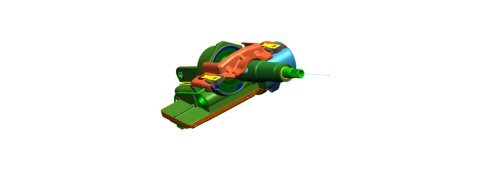
COMPOSITION
The composition of the assembly is illustrated in the diagram below.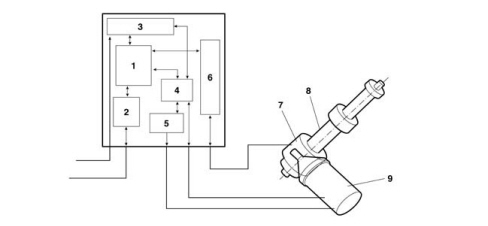
Reduction motor
The reduction motor unit comprises an aluminium casting secured to the vehicle chassis.Located at the side of the reduction motor casting, the servo motor provides the power assistance gear with a torque with a ratio of 22:1 by means of a worm screw.The reduction unit gear, coaxial and in one piece with the steering column, is made of steel, whilst the outer ring gear is made of pressed plastic. The worm screw and the gear have been designed so that the angles ensure the reversibility of the coupling.The metal part of the gear is fitted on the output shaft which transmits the total steering forces (in other words the torques for the servo motor and the driver).The input and output shafts are connected to one another by a "calibration torsion bar" which allows an angular movement of between +8° degrees and -8° (mechanical ends of travel present the torsion from being increased further).When there is resistance at the wheels, the input shaft twists the torsion bar therefore the input shat and the output shaft are offset at an angle proportional to the torque applied to the steering wheel.A torque sensor, fitted inside the reduction unit measures the difference of the angle between the input shaft and the output shaft and supplies an electrical signal to the control unit that is proportional to the difference.The reduction unit casing also has the task of retaining the outer part of the "torque and position sensor" and lastly the input shaft support cover is secured to the casing where the steering wheel is fitted and houses both the ignition switch and the steering column switch unit.On the version with an adjustable column, the angle and the axial position of the steering wheel can be adjusted on the vehicle.| The reduction unit casing must not, under any circumstances, be dismantled. It would also NOT be possible to reassemble this complex system like in the factory. |
Control unit
The control unit processes the input signals received from the sensors and operates the electric motor, providing a suitable current to achieve the desired assitance torque. It also manages the communication on the CAN and carries out the continuous autodiagnosis of the system to ensure correct operation. The communication on the CAN is managed using the diganostic equipment.The values relating to the speed of the vehicle, the alternator, the City/Normal mode and the type of tuning are read on the CAN line.The position and torque signals coming from the sensors represent the basic values with which the microprocessor processes the output data in terms of current supplied to the engine.The steering power assistance control unit is fastened to the actual electric steering casing and interfaces with the wiring by means of two separate connectors: one 10 pin and one 2 pin.CONTROL UNIT PIN OUTThe diagram below shows the control unit pin out.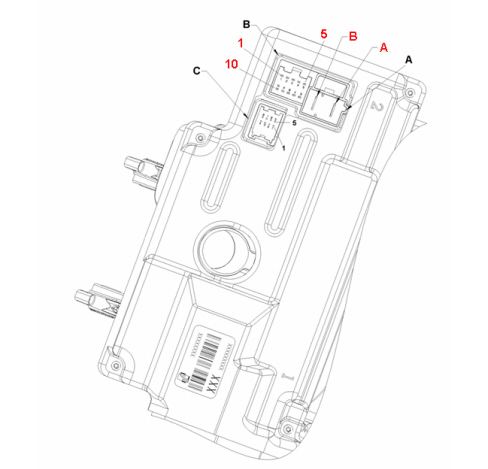
Description of the signals
Normal / City driving mode selection signal The Normal / City function has the task of varying the power assistance torque depending on the speed of the vehicle. It is possible to switch from a basic (normal) configuration to a City one using the button in the control panel.The NGE system receives the Normal / City signal from the CAN and implements the requested strategy. The body computer control unit is prepared to receive the analogue signal that is altered when the button is released switching on the signal when the torque applied by the driver is more than 1 Nm.During the ignition OFF/ON cycle, the Body Computer control unit maintains the status requested previously by the user.The steering is always assisted (with the CITY function on the power assistance is greater) and decreases as the speed increases.CAN serial lineThe control unit is capable of receiving/sending information on the CAN with this network interface operational from when the key is turned on until it is turned off.Signals received / sent via the CANThe following signals are received from the NGE via the CAN:- Vehicle speed- Failure light status- Engine running signal (D+)- Fault diagnosis- Vehicle speed signal error- Normal/City mode- Type of tuning (calibration)The following signals are sent by the NGE control unit via the CAN:- System status (failure)- Power assistance activated signal (EPS Active)- Fault diagnosis- Steering wheel absolute position (only for NGE version with versions with ESP)OPERATION
The diagram showing the operation of the system is illustrated below.
Operational behaviour
The operational behaviour of the system is illustrated in the table below.| INPUT | OUTPUT |
|---|---|
| Vehicle speed reading (4) (via CAN) | Regulates the power steering depending on the speed of the vehicle and the recommended torque for the steering wheel. |
| Alternator D+ reading (3) (via CAN) | The control module is able to know from this reading whether the engine has been started. |
| System error | Failure warning light on via CAN |
| Normal/City selection (included in the system) | Depending on the request made by the driver using the button, the system activates the corresponding strategy (hard/soft). |
| System electrical load (system reading) | The system transmits this information to the engine control module via the CAN and the module, in turn, implements the appropriate strategy for regulating the engine idle speed. The control panel of the NGE node is capable of identifying the variations in the timing of the current absorbed by the node during its operation. The control panel recognizes when the positive and negative levels are exceeded and retransmits this information via the CAN. |
ELECTRIC MOTOR
Specifications
The electric motor is the three-phase self-switching synchronous type (without blades) with a permanent magnet rotor.The distribution of the power and the control of the phases are regulated by the NGE management control unit.Composition
The composition of the electric motor is illustrated in the diagram below.

Operation
The engine absorption current ranges from 1 A to 80 A; the maximum absorption condition exists at equivocal manoeuvres at high steering wheel rotation speeds.The motor has been designed to provide the torque required, in other words it has been designed to help the user depending on the effort required on the steering wheel.The wheels offer different resistance to the steering column depending on whether they are resting on ice or asphalt, for example.As a result the motor provides the necessary torque.

| ... DATA ERROR - CROPPED TEXT | Ошибка данных - Текст обрезан ... |
|---|