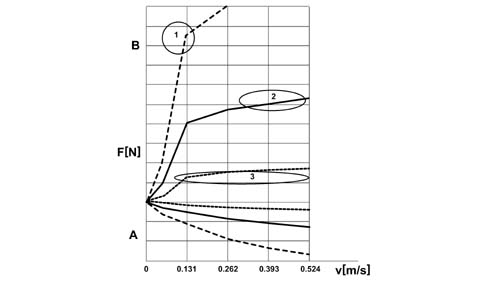
Normally, when setting conventional shock absorbers a compromise is sought between the requirements of stability, safety and comfort. The diagram below shows the typical response curves for traditional shock absorbers where it can be seen that the areas of stability and comfort are not interrupted because the choice of calibration is obviously determined by safety requirements.
The damping control systems, already available on the Lancia k, also provide the possibility of damping which is suitable for the conditions in which the vehicle finds itself; it is possible to alter the specifications of the shock absorbers between three different curves which can be produced through the valves fitted on the shock absorbers according to the style of the driver. The diagram below illustrates the typical shock absorber response curves and the three different responses in terms of stability, safety and comfort can be seen.
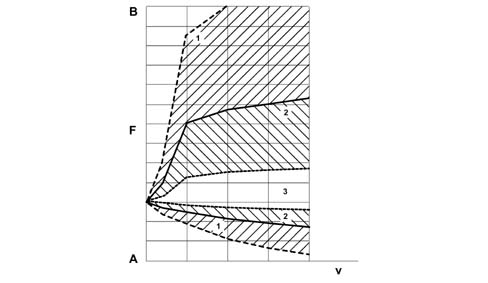
The Mannesmann-Sachs Sky Hook system designed for the Lancia Thesis allows an enormous leap in terms of quality; through the intervention of proportional valves located in the shock absorbers, the system is capable of continuously altering the damping within a wide operating range as can be seen in the diagram.
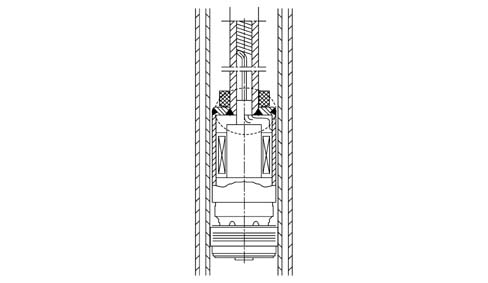
The proportional valves, illustrated in cross section in the diagram below, can be operated, moment by moment, by a control unit which evaluates certain factors such as load, road conditions, vehicle drive and the reactions of the driver, and, in the space of a few milliseconds, selects, indepedently for each wheel, the most suitable damping value for the conditions in which the vehicle finds itself, thereby maximizing the driving comfort and the stability of the vehicle.In this way the optimum damping selection made by the Sky Hook system activately supports the driver in critical situations, significantly increasing safety and stability in addition to pleasant driving conditions.
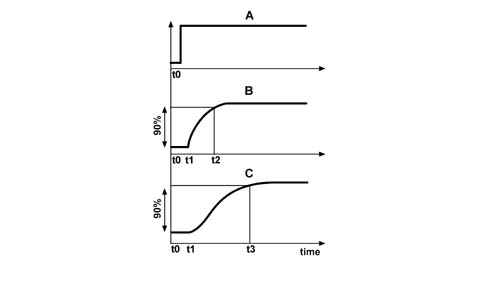
The variation in the damping is implemented by the proportional valves operated by the control unit in a very short space of time; graphs A, B and C in the diagram below show the system response times in terms of intervention request (A), necessary current generation times (B) and required damping force generation time (C).
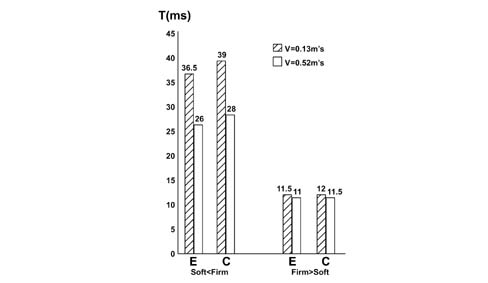
The diagram below contains the damping foce generation time values in the case of a shock absorber oscillation speed (bodyshell - wheel relative speed) of 0.13 m/s and 0.52 m/s; in particular, it is possible to observe generation times during the shock absorber extension and compression stages in the case of Soft (comfort) or Firm (stability) strategies.
INTRODUCTION
The Sky Hook CDC (Continuous Damping Control) system is capable of actively controlling the damping level fo the suspension modifying the hardness of the shock absorber.The aim of the system is to improve the control of vertical oscillations and the comfort and handling of the vehicle acting on the vertical forces on the ground developed by each suspension, in particular differentiating between them individually according to the dynamic behaviour of the vehicle.
OPERATING PRINCIPLE
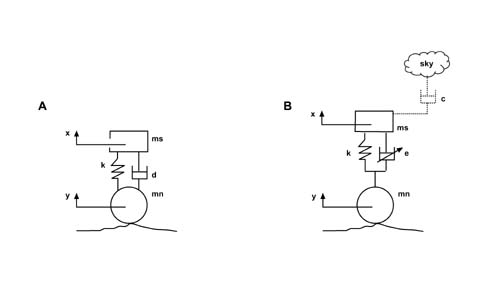
The name Sky Hook is derived from the particular configuration of the theoretical suspension model on which the shock absorber management logic is based.In the theoretical Sky Hook mode the shock absorber, rather than being positioned parallel to the spring like on conventional models, is positioned in series to it and is connected to the chassis by a "dummy roof" which ideally follows the vehicle on its horizontal plane but is fixed along Z.
The fundamental difference compared with conventional operation consists in the fact that in the Sky Hook model the relation of the shock absorber only depends on the movement of the chassis, whilst on the conventional version it depends on the relative chassis-wheel and body-wheel movement.Obviously a system of this type cannot be produced in practice because the shock absorber cannot be physically positioned above the body; however, it is possible, managing the shock absorber according to a suitable logic, to confer the Sky Hook behaviour on a conventional suspension system.The advantage of this design, compared with a conventional, passive shock absorber, consists of:
Less transmission to the body of the stress inputs coming from the wheels (vibrations) and therefore a decrease in the vertical accelerations which can be measured at the pedals and at the driver's seat in the passenger compartment.
A decrease in roll (and roll speed) and in pitching during dynamic manoeuvres.
SYSTEM COMPOSITION
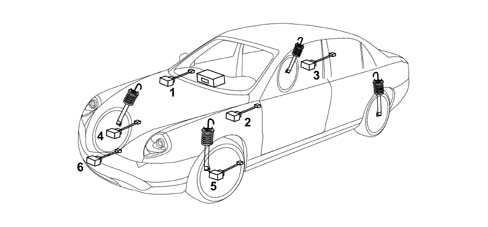
The system consists of:
Three vertical accelerometers, located near the front turrets and the (right) rear turret which measure the bodyshell vertical acceleration signals.
Two vertical accelerometers, located near the lower part of the front shock absorbers, which measure the wheel assembly vertical acceleration signals.
A lateral accelerometer, located in the front of the vehicle, which measures acceleration when cornering.
Four variable calibration shock absorbers, controlled via solenoid valves.
An electronic control unit.
THE SKY-HOOK STRATEGY
Sky Hook system
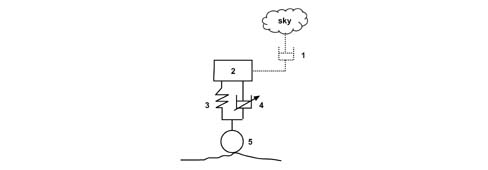
The system consists of six sensors capable, through numerical integration, of determining the relative speed between the bodyshell and the wheels and consequently of selecting the optimum damping force that each shock absorber should provide; the instant detection by the sensors and the compression and extension adjustment guarantee that the damping forces produced at any moment contribute to braking the absolute vertical motion of the vehicle as if the bodyshell were attached to the sky by a shock absorber.Sky Hook Principle
The control unit acquires the signals from the sensors and, after suitable filtering, controls and processes, calcuates/measures:
Vehicle speed
Vertical speed of the four turrets (the acceleration of the turret at which the sensor is not present is deduced on the basis of the three, considering the bodyshell as rigid)
Vertical speed of the four wheel hubs (the acceleration of the two rear hubs where there is no sensor is deduced on the basis of the acceleration for the two front turrets, the track and the speed of the vehicle)
Relative vertical speed between hubs and bodyshell
Lateral acceleration
Derivative of the lateral acceleration
Longitudinal accleration (derivative of the vehicle speed)
Brake signal (On/Off)
According to the signals calculated/measured and some tuning parameter groups, it calculates the optimum value for the vertical force at each shock absorber.Once these optimum vertical force values have been evaluated for the individual shock absorbers, the system identifies the current value, using an internal map, to supply each solenoid valve to produce the above mentioned vertical force. At the same time it evaluates the maximum or minimum values for these supply currents for the solenoid valves and, when necessary, limits them.The currents, calculated and filtered in this way, are sent to the solenoid valves to regulate the hardness of the shock absorber to optimum value calculated previously.
Electronically-controlled suspension
The Sky Hook suspension is managed by a control unit located in the luggage compartment. This control unit operates autonomously, in other words the control functions do not pass through the C-CAN or B-CAN.The "VS" NRF/NBC line signal is the exception and is designed for the hardware repetition of the vehicle speed signal to the following control units: